Делаем плоттер своими руками
Электронные компоненты

Шаговый электродвигатель имеет четыре вывода:
Пара выводов внутренне подсоединена к электромагнитной катушке. Используя мультиметр, вы сможете легко определить пару, подсоединенную к катушке.
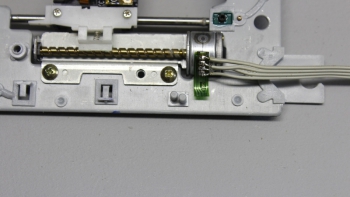
Не снимайте фольгу с выводов, поскольку при ее отрыве существует вероятность сорвать и медные провода с выводов, что неминуемо приведет к повреждению двигателя!
Старые линии питания с фольгой можно обрезать.
Новый шлейф должен быть припаян к выводам.
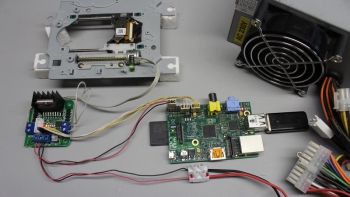
Плата имеет четыре выходные клеммы:
Каждую пару выходов необходимо подсоединить к одной из катушек на шаговом электродвигателе. Кроме того, есть еще четыре входных вывода, которые следует подсоединить к выводам общего назначения GPIO микрокомпьютера Raspberry Pi. И, наконец, 5 В источник электропитания нужно подсоединить к выводам «Ground» и «VCC».
Одна катушка электродвигателя потребляет ток около 500 мА, что превышает максимально допустимый ток, предоставляемый 5 В выводом Raspberry Pi!
Следовательно вам необходимо использовать блок питания от старого компьютера или отдельную батарею, чтобы обеспечить для механизма требуемую электрическую энергию.
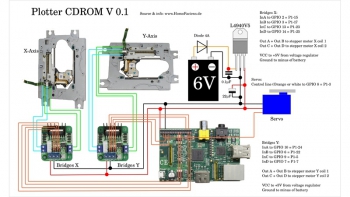
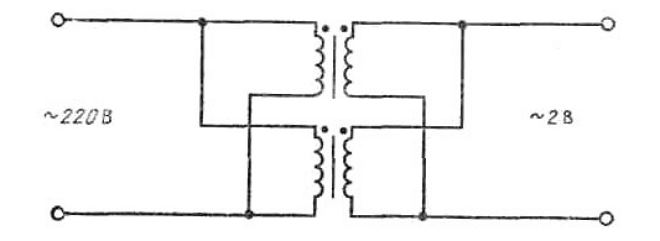
Схемное решение для WLAN плоттера.
Программное обеспечение
Программное обеспечение работает в командном режиме, поэтому вам необходимо входить в систему через ssh для управления работой WLAN плоттера. Исходный код можно загрузить по следующей .
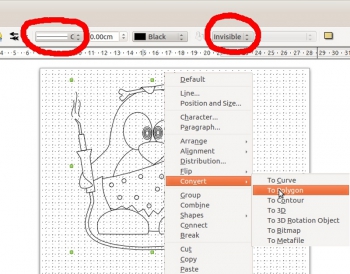
Программное обеспечение позволяет вычислять растровые изображения (в формате *.bmp) с разрешением 55 x 55 пикселей и глубиной цвета 24 бита. Любой другой тип растровых изображений будет проигнорирован программой. Пиксели с красными, синими или зелеными компонентами меньше, чем 200, считаются черными и будут чертиться плоттером. Все остальные пиксели считаются белыми и пропускаются. Устройство поддерживает векторный формат «Scalable Vector Graphics – масштабируемая векторная графика (*.svg)». При этом следует заметить, что чертятся не области, а только их контуры. Все траектории (и контуры областей) должны быть установлены в режим «Polygon» (Замкнутая линия). Функционирование проверялось на примере графических файлов, которые редактировались и экспортировались в формат svg программой Libre Office Draw.
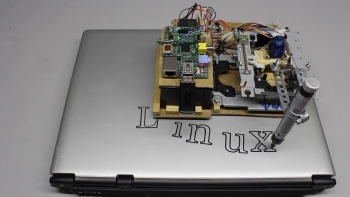
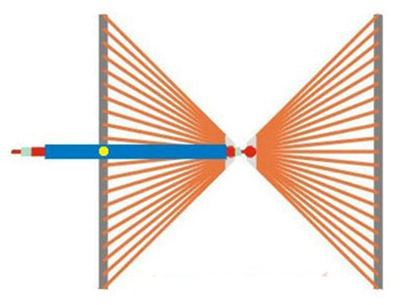
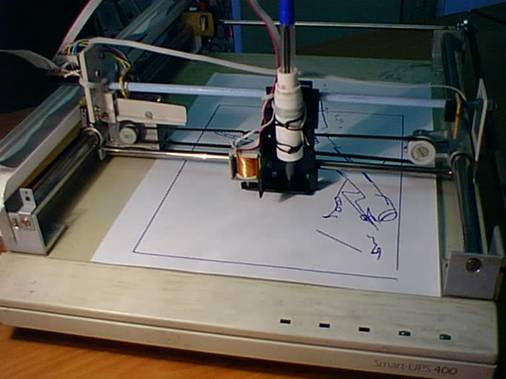
Благодаря специальной конструкции плоттера вы можете использовать водостойкое перо для рисования практически на любой плоской поверхности. Область, охватываемая пером, имеет площадь 35 на 35 миллиметров. Для перемещения пера на 35 миллиметров необходимо выполнить 250 шагов.
Надпись, показанная здесь, естественно больше, чем область охватываемая плоттером. После написания одного символа, весь плоттер вручную перемещался вправо.
Оригинал статьи
Плоттер из принтера
Графопостроители классифицируются по различным критериям. Аппараты, в которых носитель закрепляется неподвижно механическим, электростатическим или вакуумным способом, называются планшетными. Такие устройства могут как просто создавать изображение, так и вырезать его, при наличии соответствующей функции. При этом доступна горизонтальная и вертикальная резка. Параметры носителя ограничиваются только размерами планшета.
Режущий плоттер по-другому называется катер. Он имеет встроенный резец или нож. Наиболее часто изображения вырезаются аппаратом из таких материалов:
- обычной и фотобумаги;
- винила;
- картона;
- различных видов пленки.
Сделать планшетный печатающий или режущий плоттер можно из принтера: в первом случае в держателе будет установлен карандаш (ручка), а во втором – нож либо лазер.
Самодельный планшетный графопостроитель
Чтобы собрать устройство своими руками, понадобятся следующие комплектующие детали и материалы:
- шаговые двигатели (2), направляющие и каретки из принтеров;
- Arduino (совместимый с USB) или микроконтроллер (например, ATMEG16, ULN2003A), служащий для преобразования поступающих с компьютера команд в сигналы, вызывающие движение приводов;
- лазер мощностью 300 мВт;
- блок питания;
- шестерни, ремни;
- болты, гайки, шайбы;
- органическое стекло или доска (фанера) в качестве основы.
Простейший вариант планшетного графопостроителя собирают в такой последовательности:
делают основу из выбранного материала, соединяя элементы конструкции болтами или склеивая их;
Основа
сверлят отверстия и вставляют в них направляющие как на фотографии ниже;
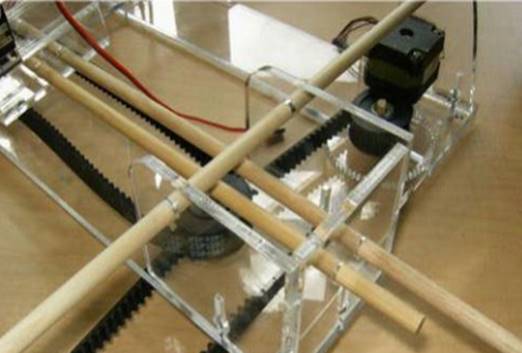
Установка направляющих
собирают каретку для установки пера либо лазера;

Каретка с отверстиями под направляющие
собирают крепление;
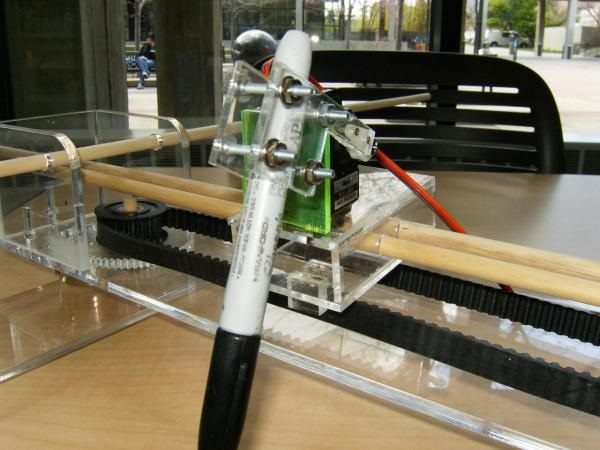
Крепление под маркер

Фиксирующий механизм
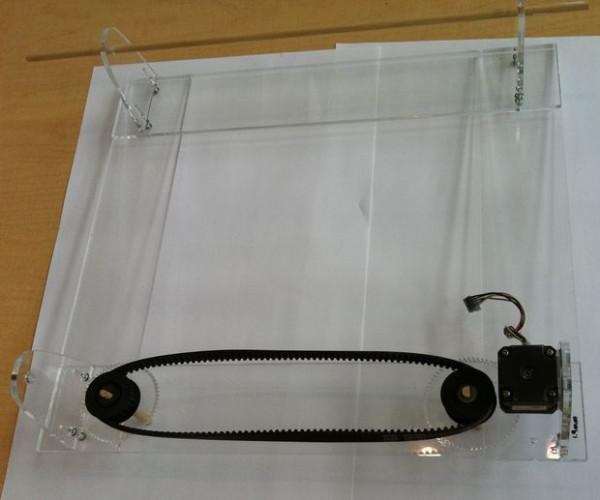
устанавливают шаговые двигатели, шестерни, ремни, получая изображенную ниже конструкцию;
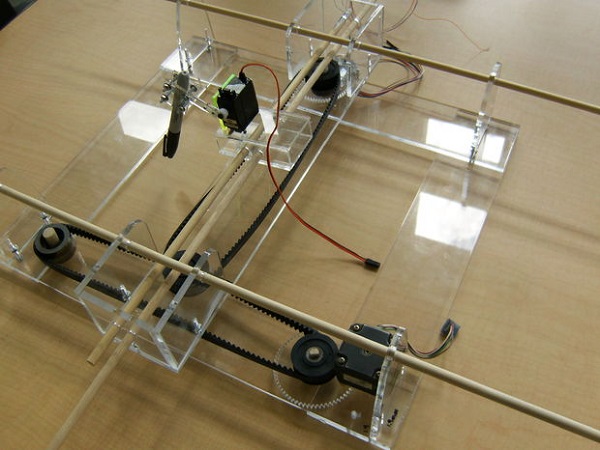
Собранный самодельный плоттер
- соединяют электрическую схему;
- устанавливают программное обеспечение на компьютер;
- запускают устройство в работу после проверки.
Если использовать Arduino, то подойдут рассмотренные выше программы. Применение разных микроконтроллеров потребует установки различного ПО.
Приведенную конструкцию можно усовершенствовать, добавив автоматики. Детали по параметрам понадобится подбирать опытным путем, исходя из имеющихся в распоряжении. Возможно, некоторые потребуется докупить.
Оба рассмотренных варианта графопостроителей можно сделать самостоятельно, лишь бы была старая ненужная техника и желание. Такие дешевые аппараты способны рисовать чертежи, вырезать различные изображения и фигуры. До промышленных аналогов им далеко, но при необходимости частого создания чертежей, работу они значительно облегчат. При этом программное обеспечение доступно в сети бесплатно.
4xiDraw почти готов
В этой части продолжим сборку и настройку механической части плоттера. Подключим электронику и настраиваем ток драйверов A4988
Для сборки «4xiDraw» использовали:
2 шаговых двигателя nema 17 тут
4 8mm Гладкие стержни 2 шт. 400mm и 2 шт. 320mm (куплено в строительном магазине)
2 M10 Резьбовые стержни 400mm (куплено в строительном магазине)
8 LM8UU Линейные подшипники тут
2 GT2 Шкивы тут
10 F623ZZ подшипники тут
1 micro servo SG90 (плюс удлинитель кабеля 250 мм) тут
1 Arduino UNO тут
1 CNCshield тут
2 x Драйвер шагового двигателя A4988 тут
1 GT2 Ремень 1.4 метра тут
8 M10 гайки (куплено в строительном магазине)
8 30mm M3 Винты с гайками (куплено в строительном магазине)
8 6mm M3 Винты (куплено в строительном магазине)
4 16mm M3 Винты с гайками (куплено в строительном магазине)
4 M3 шайбы (куплено в строительном магазине)
2 15mm M3 винты (куплено в строительном магазине)
1 12V 2A блок питания (куплено в магазине электротоваров)
1 USB кабель (в любом магазине электроники)
1 Перьевая ручка ну или просто маркер
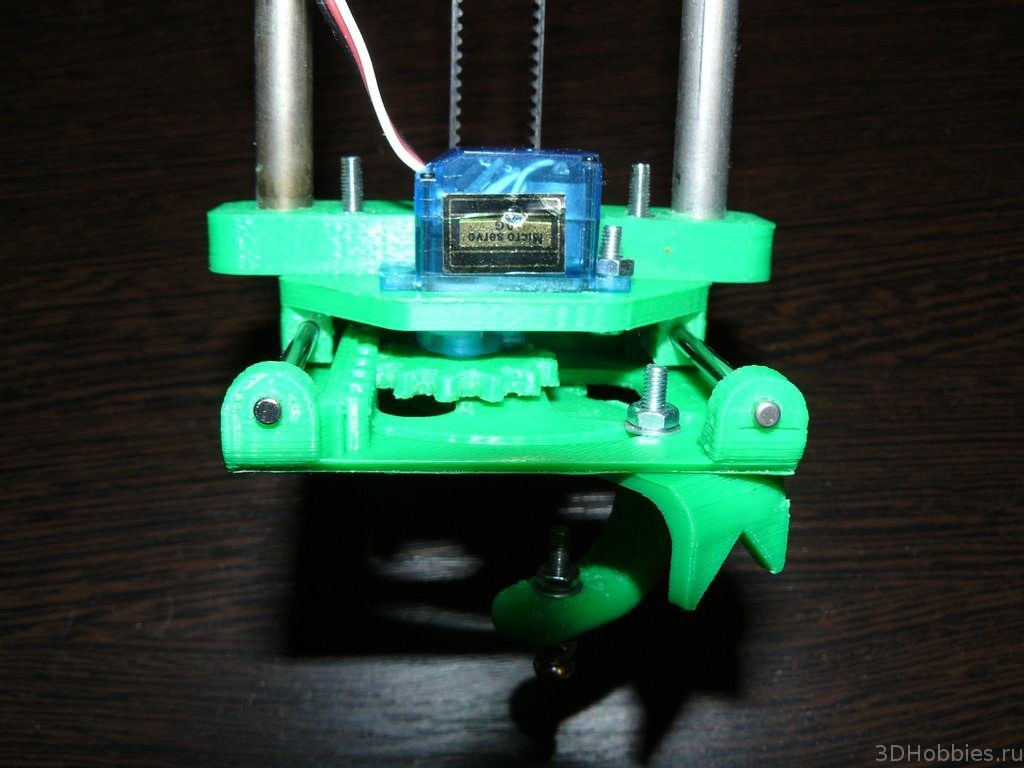
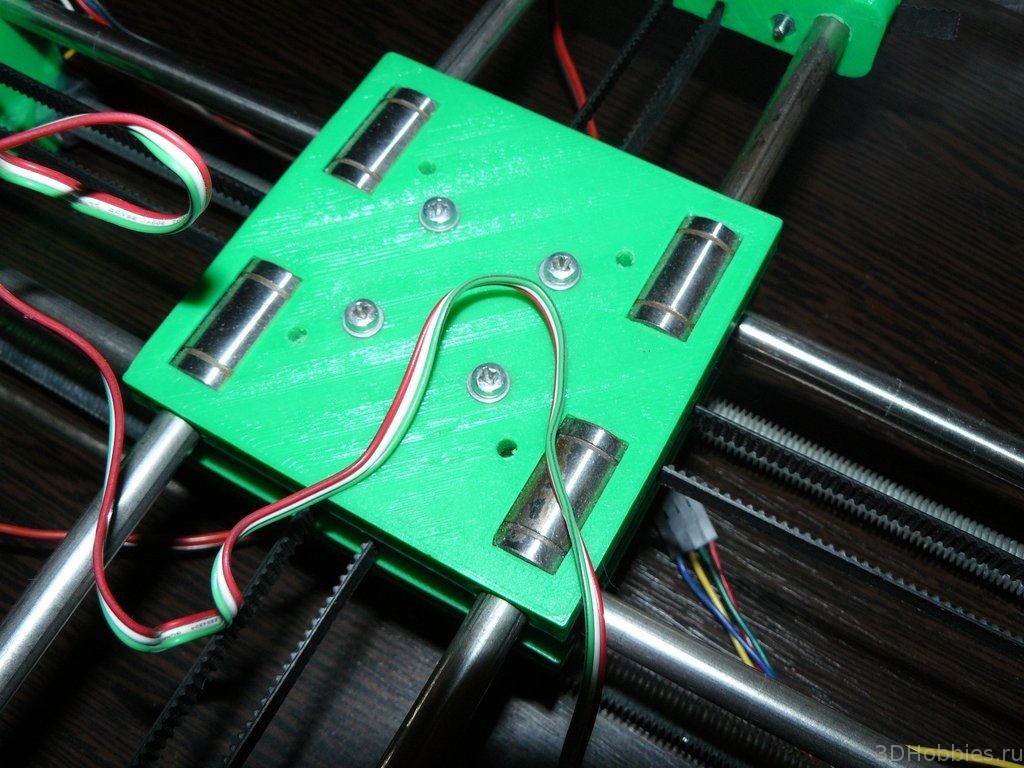
Было решено использовать немного модернизированную конструкцию каретки с шестернёй
STL carriage_gear, engrenagem
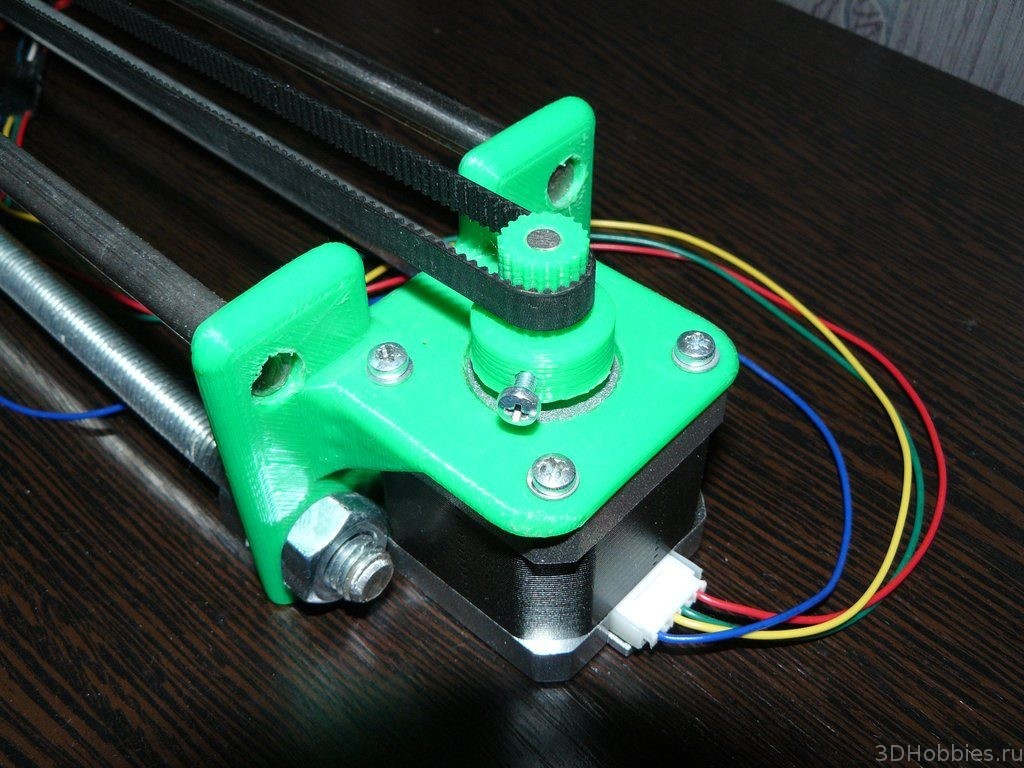
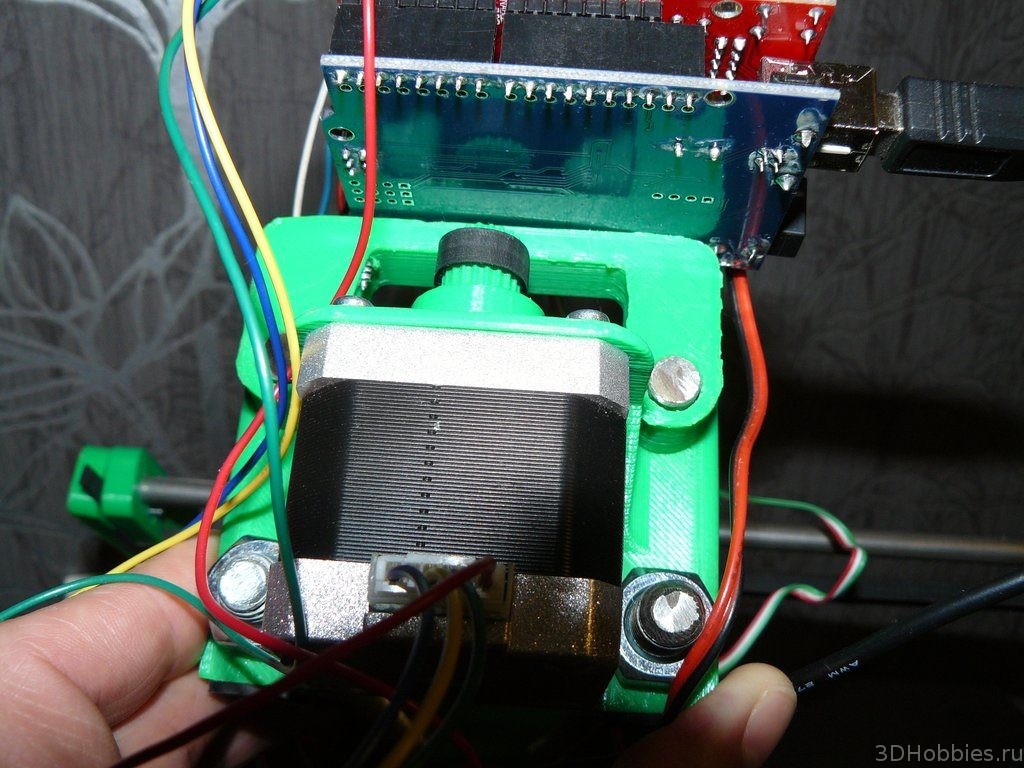
Моторы Nema 17HS4401 отлично подошли для нашего проекта 4xiDraw
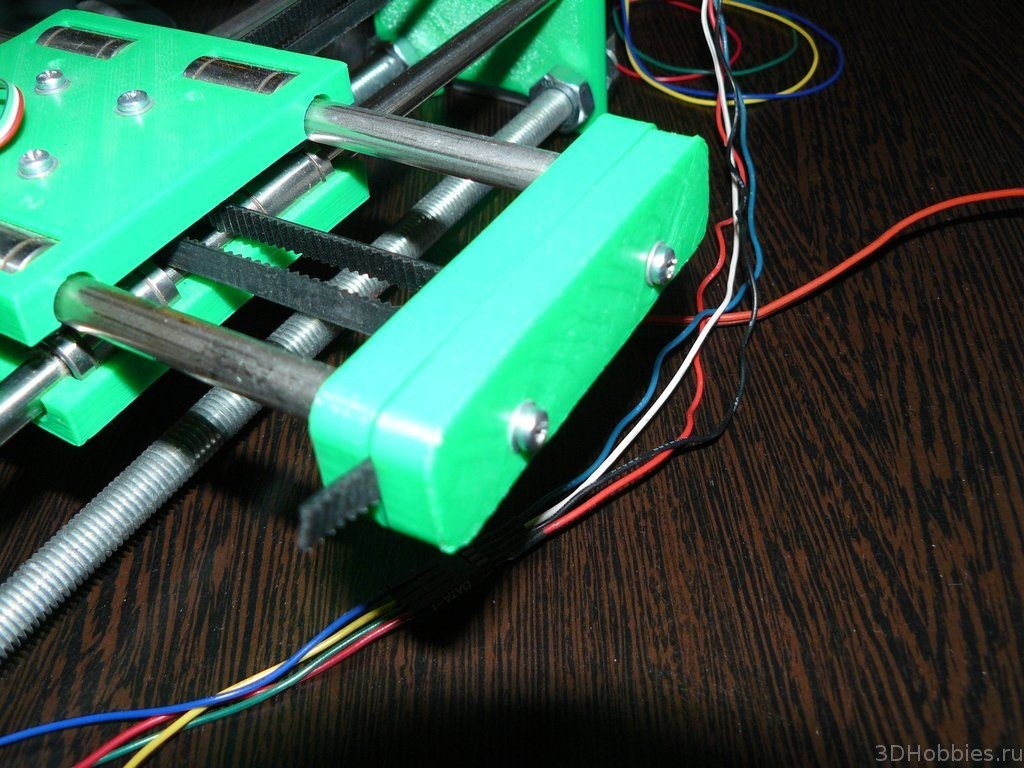
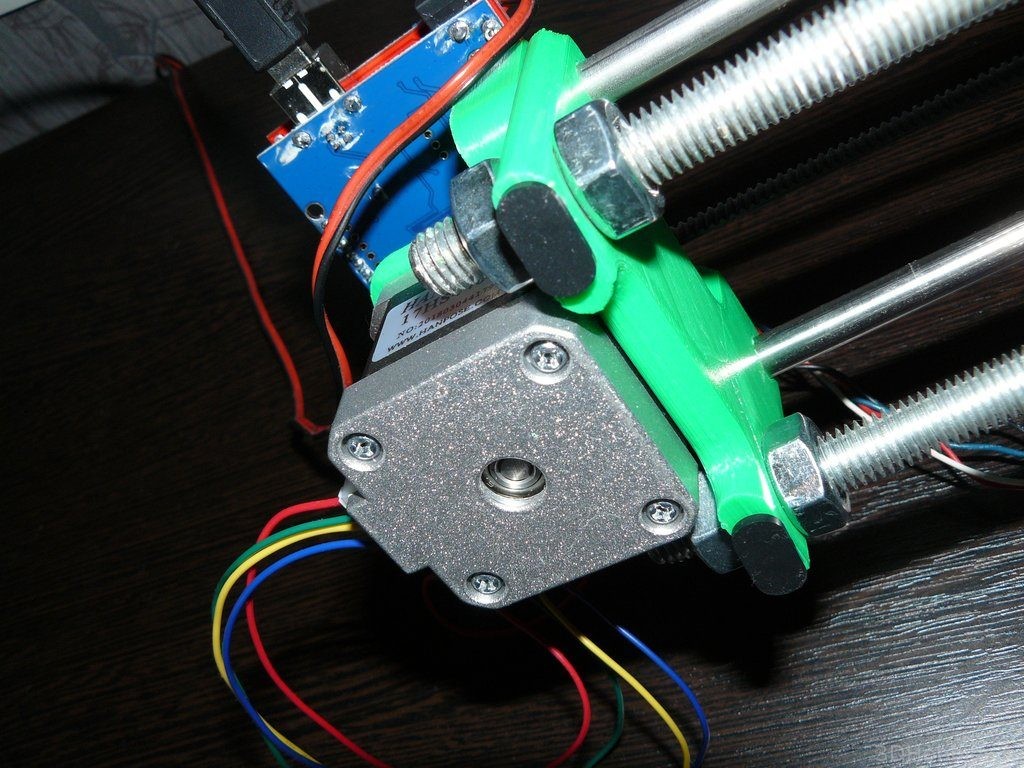
Регулируем натяжение ремня и затягиваем болты
STL1, STL2
Можно использовать печатные шестерни (20 зубьев)
STLка шестерни для печати
Линейные подшипники LM8UU плотно встали
STLка пришлось немного увеличить по высоте держатель для Arduino
Резиновые накладки на ножки уменьшат немного шум и вибрации при работе плоттера
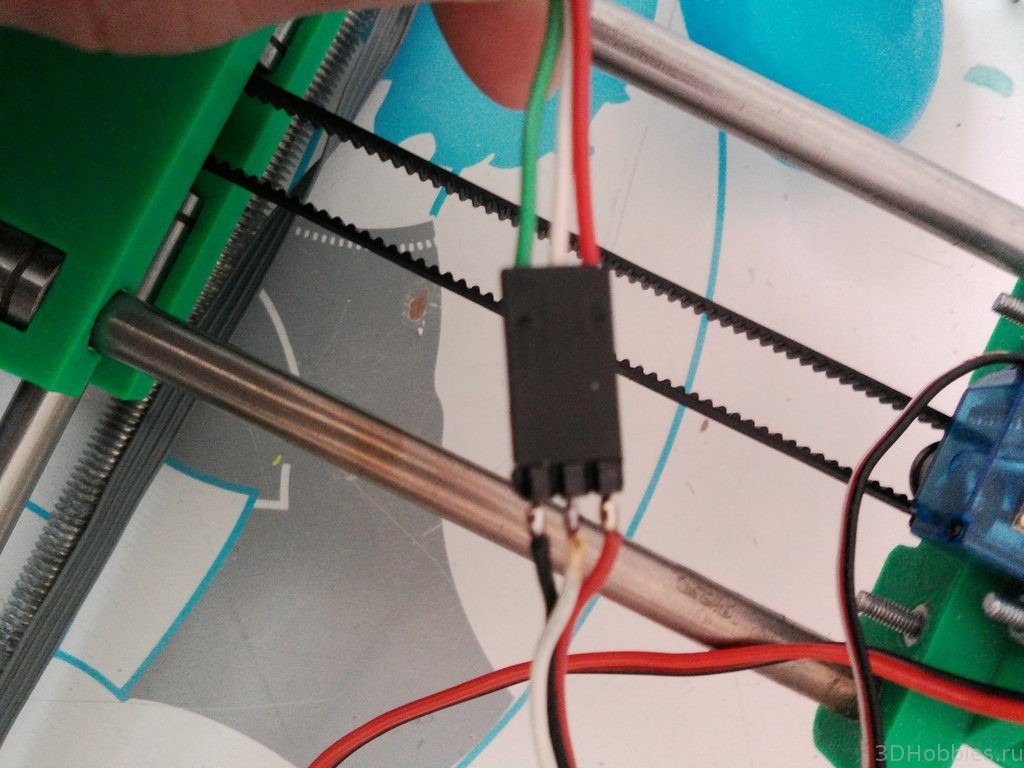
Подключаем servo SG90 нам пришлось использовать удлинитель так как провода от сервопривода очень короткие
сервопривод — удлинитель
красный — красный
белый — белый
чёрный — зелёный
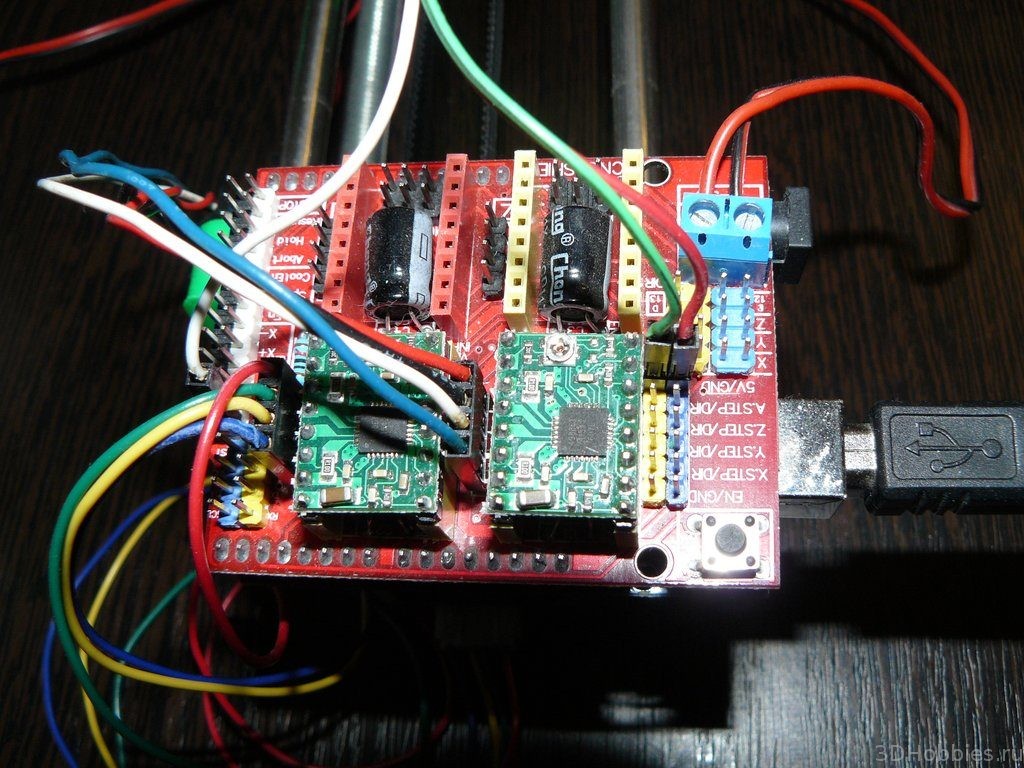
При установке драйверов шагового двигателя A4988 обратите внимание на правильность установки!!! (иначе нужно будет покупать новые драйвера)
Далее будем настраивать рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
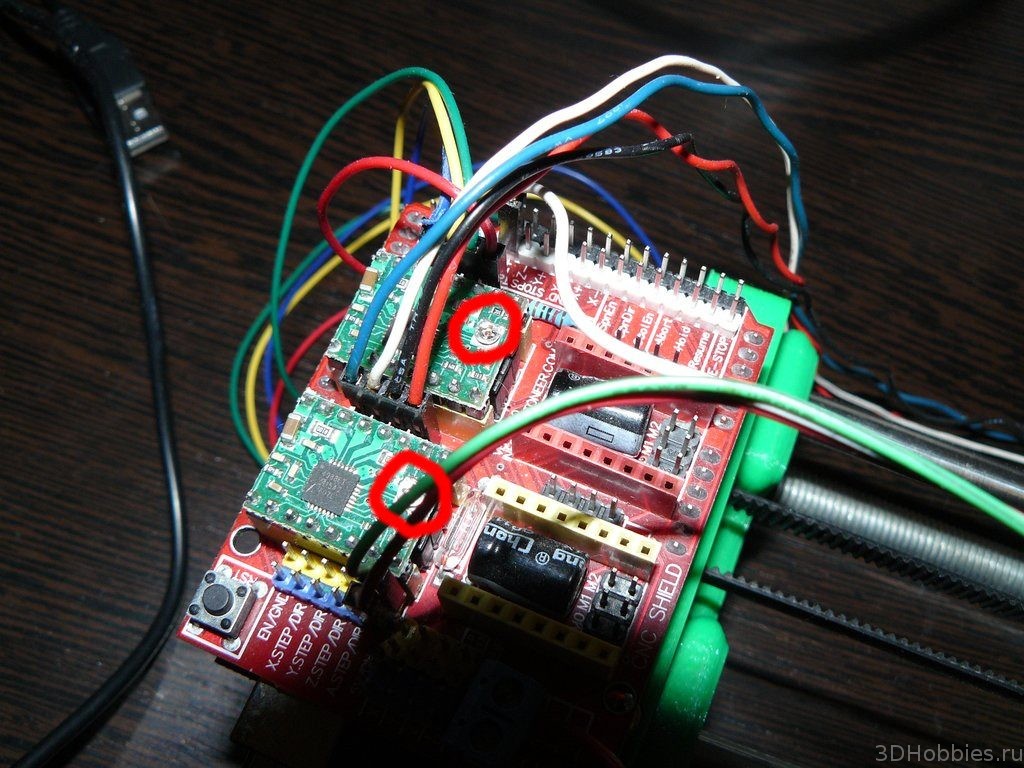
Краткая инструкция настройки тока драйвера шд: Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя. Для каждого вида драйвера своя формула расчета Vref.
На фото подстроечный резистор выделен красным цветом
в 3 заключительной части мы загрузим прошивку и настроим программное обеспечение для рисования
ссылка на первую Часть
ссылка на третью Часть