Робот пылесос своими руками
Содержание:
Процесс сборки
Пошаговый процесс сборки робота-пылесоса Ардуино:
- Разложить компоненты конструкции будущего изделия на ровной поверхности для определения взаимного расположения и габаритов корпуса.
- Вырезать из картона круглое основание.
- Выполнить на детали прорези для боковых колес, которые располагаются по поперечной оси симметрии.
- Закрепить электрические приводы колес пластиковыми хомутами к корпусу.
- Прорезать канал для забора воздуха и зафиксировать клеем турбину над полученным окном. Узел крепится на противоположной от двигателей ходовой части стороне поддона.
- Разметить зону установки контейнера для пыли, который размещается над окном с роторным рабочим колесом.
- Установить и закрепить термическим клеем на внутренней части магниты (по предварительно размеченному контуру резервуара для пыли). Ответные магнитные элементы размещаются через лист бумаги на противоположной стороне поддона. Емкость для пыли приклеивается к магнитам, которые плотно прижимаются к боковой поверхности резервуара. Лист бумаги удаляется, коробка удерживается на запланированной монтажной точке взаимным притяжением магнитов.
- Закрепить на верхней плоскости поддона аккумуляторную батарею и контроллер Ардуино. Допускается установка элементов в направляющие узлы, изготовленные из древесины или пластика. Пользователи используют стандартные блоки управления Ардуино, часть владельцев самостоятельно корректирует прошивку микропроцессора путем подключения изделия к компьютеру.
- Разместить блок H-Bridge поверх контроллера и соединить электронику пылесоса с аккумулятором. Для соединения кабелей применяется пайка и установка коммутационных штекеров.
- Подключить электрические двигатели к выводам блоков управления.
- Вырезать картонные заготовки для фронтального бампера. Детали монтируются на передней части корпуса, точка соединения допускает перемещение бампера после столкновения робота с препятствием.
- Припаять отрезки кабеля к прямоугольным жестяным пластинам (требуется изготовить 2 элемента). Металлические пластинки устанавливаются на расстоянии от внутренней стороны импровизированных бамперов. На внутренней поверхности бампера наклеивается фольга, на которую подается положительное напряжение от батареи. При столкновении пластинка соединяется с фольгой и работает как датчик препятствия. В сигнальной цепи от пластины устанавливается дополнительное сопротивление, снижающее риск ложных срабатываний.
Для очистки воздуха от пыли применяется фрагмент от кухонной салфетки, изготовленной из волокнистого синтетического материала. Элемент устанавливается под основанием контейнера пылесборника и удерживается магнитами. В самом контейнере прорезается прямоугольный канал, через который затягивается воздух с пылью. Для регулировки зазора между резервуаром и напольным покрытием применяется сменное дистанционное кольцо из картона или пробки.
Описание самодельного робота пылесоса
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Робот пылесос — Часть1 Механика
Наверное, каждый, кто только начинает по-настоящему увлекаться робототехникой, электроникой или программирование, проходя сложный путь изучения сопутствующих технологий, надеется в будущем применить накопленные знания для работы над серьёзным и интересным проектом.
Я вот, например, почитав робофорум. решил собрать робот пылесос. Причина такого выбора не столько в полезности данного устройства, сколько в том что, разрабатывая его, можно сконцентрироваться на конкретной задаче: робот способный автономно убирать мусор при минимальном обслуживании.
Данная статья не является подробным описанием по сборке и настройке робота. В ней я, главным образом, хотел бы изложить свой опыт, полученный во время выполнения данной работы.
Механика:
Из всей механики робота пылесоса особую сложность в проектировании и изготовлении представляет мусороуборочный узел.
Он должен:
-Занимать как можно меньше места, но при этом иметь вместительный контейнер для мусора.
-Хорошо убирать загрязнения на любых поверхностях, но при этом обладать низким энергопотреблением и уровнем шума.
Прежде чем удалось добиться выполнения всех этих запросов, было перепробовано множество различных вариаций компоновки узла.
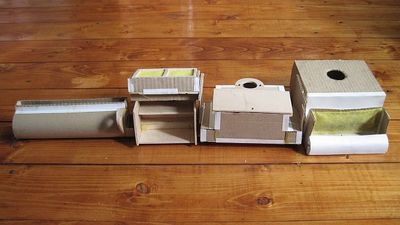
Макеты мусороуборочных узлов.
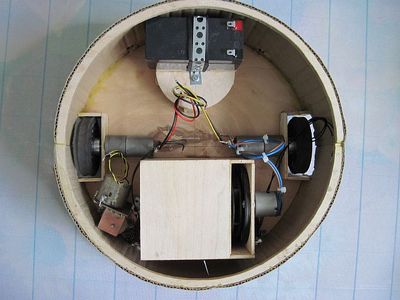
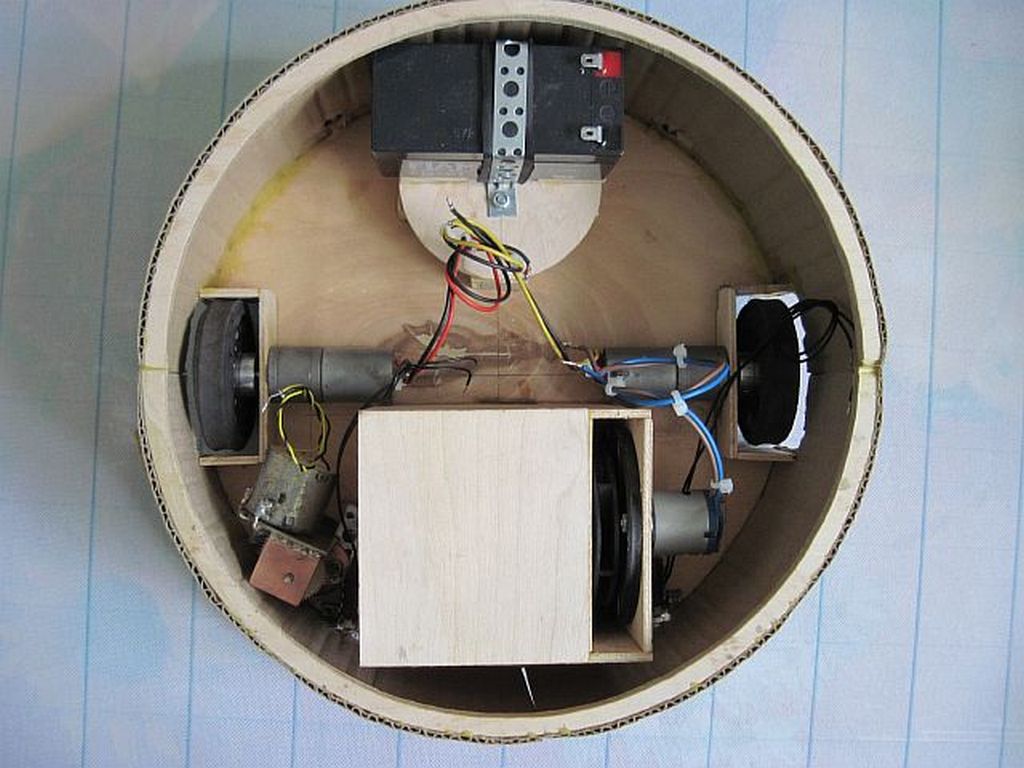
В конце — концов, остановился на схеме: широкая боковая щётка + пылесос. Радиальная щётка, расположенная с правой стороны, загребает мусор к жерлу пылесоса, расположенному по центру. Горизонтально-цилиндрическую щётку, как у Румбы, решил не ставить, так – как она лишь незначительно увеличивает качество уборки, но при этом сильно осложняет конструкцию жерла пылесоса. Устройство пылесосящего узла представлено на фото ниже.

Снаружи.
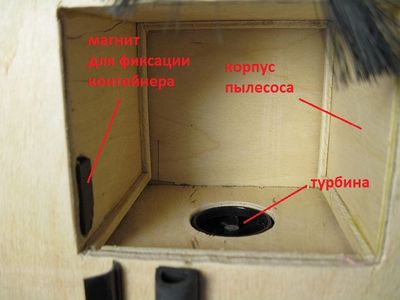
Внутри.

Контейнер.


Сборка.
Однако возникает вопрос: Где взять турбину и двигатель для пылесоса?
Можно спаять турбину из стеклотекстолита и жести
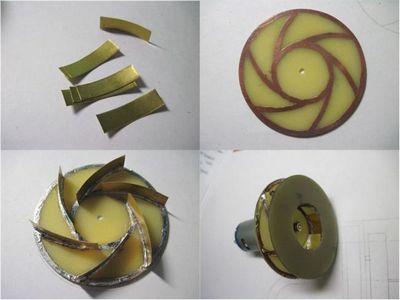
Турбина из жести.
Можно взять готовую турбину от большого пылесоса, предварительно обрезав её на токарном станке.

Готовая турбина, обрезанная на токарном станке до нужного диаметра(вентилятор от компьютера для сравнения).
А ещё её можно купить, в виде дешёвого китайского автомобильного пылесоса.
Пылесос.
Не сочтите за рекламу, но рекомендую брать именно этот пылесос(kioki), так как в нём гарантировано правильная турбина с мощным двигателем и удобным краплением (при цене, в среднем, 500р). Хотя, что касается двигателя – то его лучше заменить. У стандартного потребление порядка 3А, при замене на двигатель QX-RS-385-2073 с потреблением 1.2А, мощность всасывания падает незначительно, зато робот начинает меньше шуметь и дольше бегает без подзарядки. Что касается самодельных турбин, они хоть и хорошо всасывают, но их довольно сложно отцентрировать так чтобы не было вибрации.
Боковая щётка собрана из двигателя от магнитофона, подключённого к оси с трещоткой (вынул из игрушечного шуруповёрта) через червячную передачу. Кисточки вынуты из половой швабры, и закреплены на диске из стеклотекстолита с помощью секундного клея.

Радиальная щётка.
В качестве приводных моторов служат два 25милиметровых моторредуктора, наверное, здесь нужно что-то более подходящее, например переделанные под постоянное вращение сервоприводы, но я поставил то что было под рукой.
Готовых колёс нужного размера не нашлось, поэтому пришлось вырезать их 10милеметровой фанеры и обклеить теплоизоляционной лентой, для лучшего сцепления с поверхностью. Отверстия в колесе – для энкодеров, хотя в конечном счёте я отказался от их применения из-за низкой точности.

Мотоблок.
Мотоблоки желательно ставить на независимую подвеску. В данной модификации робота я решил проверить, действительно ли она нужна, установив двигатели без подвески, в результате возникли проблемы при заезде на толстый ковёр. Оси двигателей должны совпадать диаметром окружности робота, так будет проще реализовать развороты на месте.

Подруливающее колесико.
Датчик соударений(далее бампер), сделан из двух переключателей и подвешенной на них полоске из пластмассы согнутой полукругом.
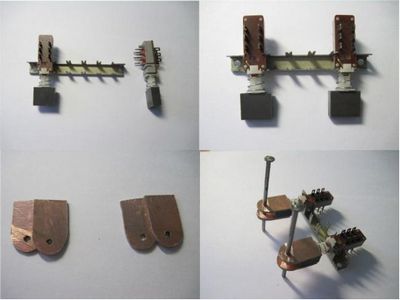
Переключатели

Бампер.
По нормальному бампер должен закрывать собой всю морду робота снизу доверху, но так-так вся мебель у меня одной высоты, то я с этим заморачиваться не стал.

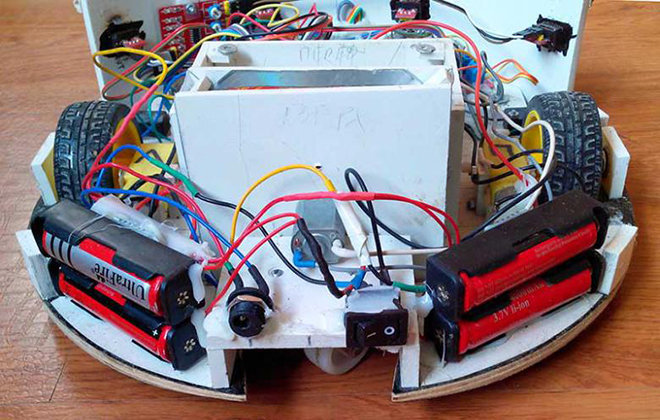
Механика робота в собранном виде.
Для проверки механической части робота была собрана следующая, простая, схема управления:
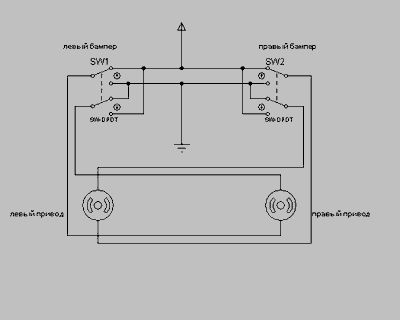
Движение в пространстве
То, как такой домашний помощник проводит уборку, понятно. Но по какому же принципу он «ездит» по дому, и как различает препятствия на своем пути? Робот-пылесос ориентируется в пространстве по одной из следующих технологий:
- лазерный дальномер;
- ультразвуковой дальномер;
- по принципу «виртуальной стены»;
- контактным датчиком;
- инфракрасным сенсором.

Робот-пылесос с помощью ультразвукового дальномера измеряет расстояние между предметами
Что касается лазерного дальномера, то здесь просто сканируется пространство и формируется некая «карта» для работы самого пылесоса. Кроме того, что так оборудование не будет врезаться в предметы, более эффективно и быстрее проводится уборка.
Виртуальная стена позволяет ставить ограничения на работу оборудования. Этот ограничитель работает при помощи инфракрасного датчика. К примеру, если вы хотите, чтобы уборка проводилась только в одной определенной комнате, модели с такой функцией будут очень кстати.

Виртуальная стена позволяет ставить ограничения на работу робота-пылесоса
Модели с инфракрасным сенсором будут актуальны в помещениях с лестницами. Именно эта функция не позволяет роботу упасть с высоты во время уборки. Также некоторые модели имеют специальный алгоритм чистки, который может корректировать пользователь. Дополнительные датчики могут тщательно сканировать пространство на предмет особенно загрязненных участков. Такие места пылесос будет чистить дольше и более интенсивно.
Современные модели имеют дополнительную систему распознавания сложных участков. Например, если робот во время уборки запутается в проводах, то функционирование всей системы прекратится до тех пор, пока устройство не съедет с опасного участка. Также такие модели имеют специальный датчик для распознавания типа поверхности. Таким образом, уборка будет проходить максимально аккуратно и качественно.
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера — достаточно лишь загрузить код на плату «Ардуино».
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).
Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Робот-пылесос своими руками 86
- 13.05.15 03:48
•
roversochi
•
#257867
•
Хабрахабр
•
•
39555
Arduino, Программирование робототехники
Поделюсь опытом создания дешевого робота-пылесоса из подручных средств и всемогущего китайского магазина. Изначально планировал просто изучить среду Arduino, но это изучение переросло в пылесос.
Необходимые детали:
— много плотного картона (бесплатно);
— аналог arduino (210 р);
— маленькая макетка (80 р);
— 2 уз-дальномера (300 р);
— контроллер моторов — H-мост (80 р);
— 2 мотор-редуктора с колесом (600 р);
— блок аккумуляторов на +18v и контроллер заряда;
— пара метров витой пары;
— турбина от пылесоса;
— компьютерный кулер.
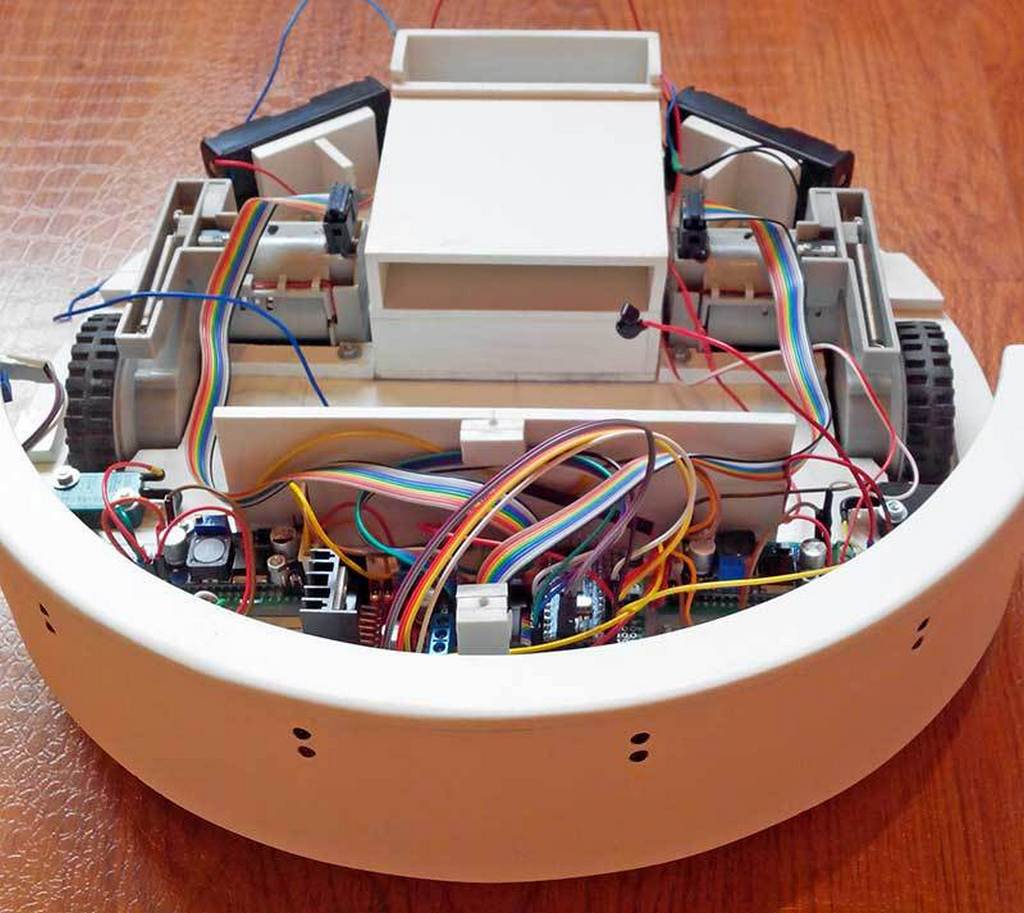
Сначала я использовал один из танков игры «Танковый бой». Все равно ими никто не играл из-за «лепешечности» выстрелов — в противника иногда «долетали» пули, выпущенные аж за стенкой.
Первым делом были выброшены все лишние детали, остался только блок моторов и сам корпус. Установлен клон Arduino UNO, драйвер моторов, УЗ-дальномер. Питание — 3 литиевых элемента по 3,7v.
Фотографии, к сожалению, не делал.
Алгоритм простой — ехать вперед, если расстояние до препятствия менее 5 см, стоп, поворот в рандомную сторону на рандомный угол, поехали дальше. Долго подбирал маленькие колеса, так как с большими эта аццкая тележка носилась как сумасшедшая по всему офису и периодически не успевала реагировать на показания дальномера.
Конструкция имела кучу минусов. Основные — колеса находятся позади и при недостаточном сцеплении колес с полом платформа не поворачивается. Буксует, но сдвигает переднюю часть очень незначительно.
Следующий этап — попытка сделать поворотную платформу. Из картона вырезал 2 круга диаметром 18 см. Склеил их волокнами поперек — получил неплохую прочность на изгиб. Блок моторов использовал от того же танка.
В качестве источника питания взял немного модернизированный блок аккумуляторов от уже давно поломанного ручного пылесоса Bork. Там уже встроенный контроллер зарядки, зарядное устройство, индикаторы и прочая лабуда. Выходное напряжение 18 вольт. Логика запитана от LM7805, моторы от понижающего преобразователя. В таком подключении есть возможность регулировать скорость платформы «аппаратно».

Полученный прототип передвигался намного медленнее и адекватнее. Но все равно работа дальномеров не нравилась.
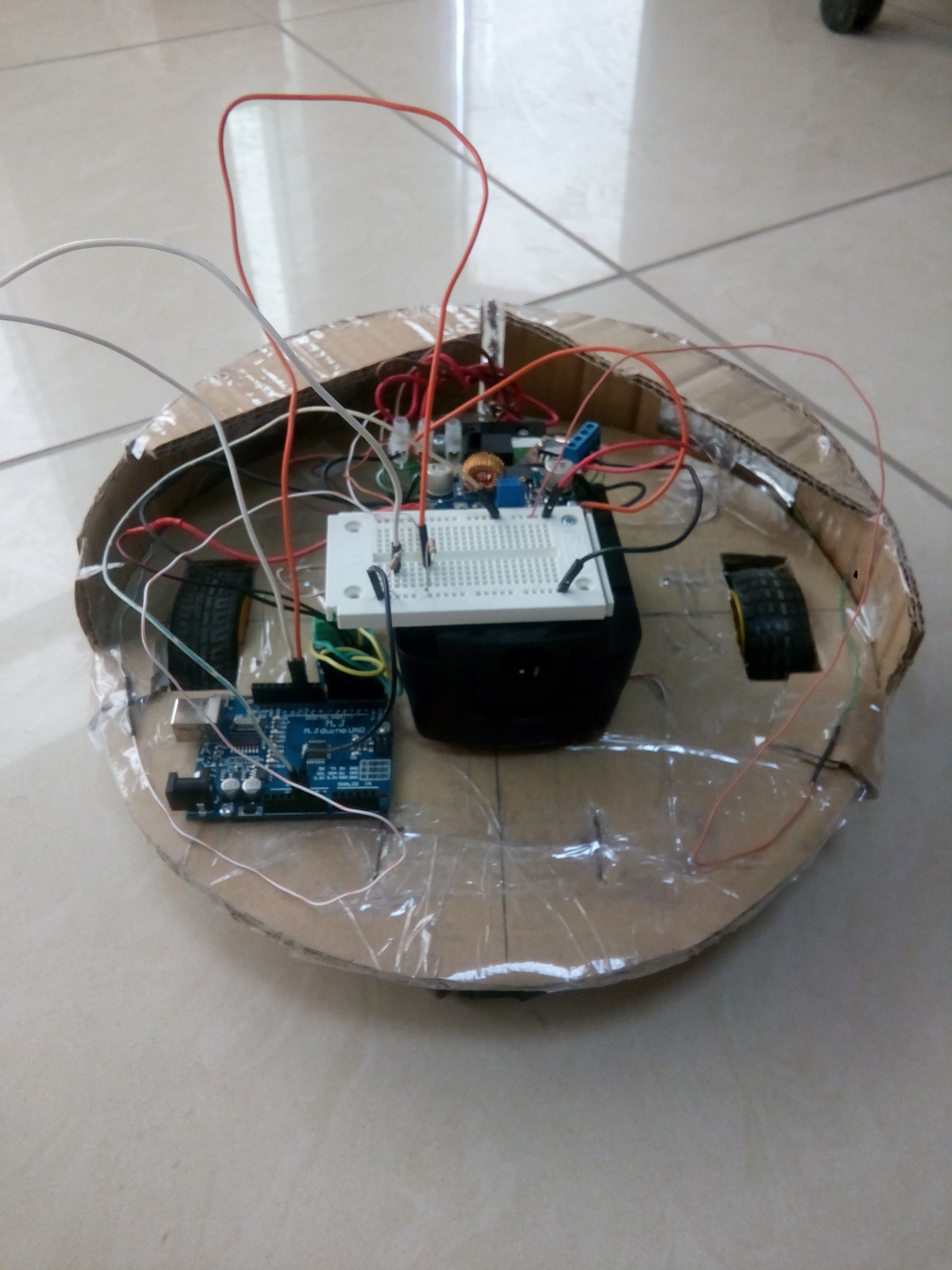
Следующий этап — решил делать на той же основе, но платформу собрать бОльшую, чтоб в нее влез еще пока не собранный пылесос. Диаметр — 30 см. Таким же образом склеил 2 круга.

Основной проблемой было избавиться от дальномеров. В итоге используются очень простые по конструкции контактные бампера. 

С внутренней стороны бамперов клеим фольгу, подводим к ним +5, на платформе напротив них закрепляем изогнутый проводок от витой пары, подтянув ее к минусу через резистор, так как без резистора будет очень много ложных срабатываний.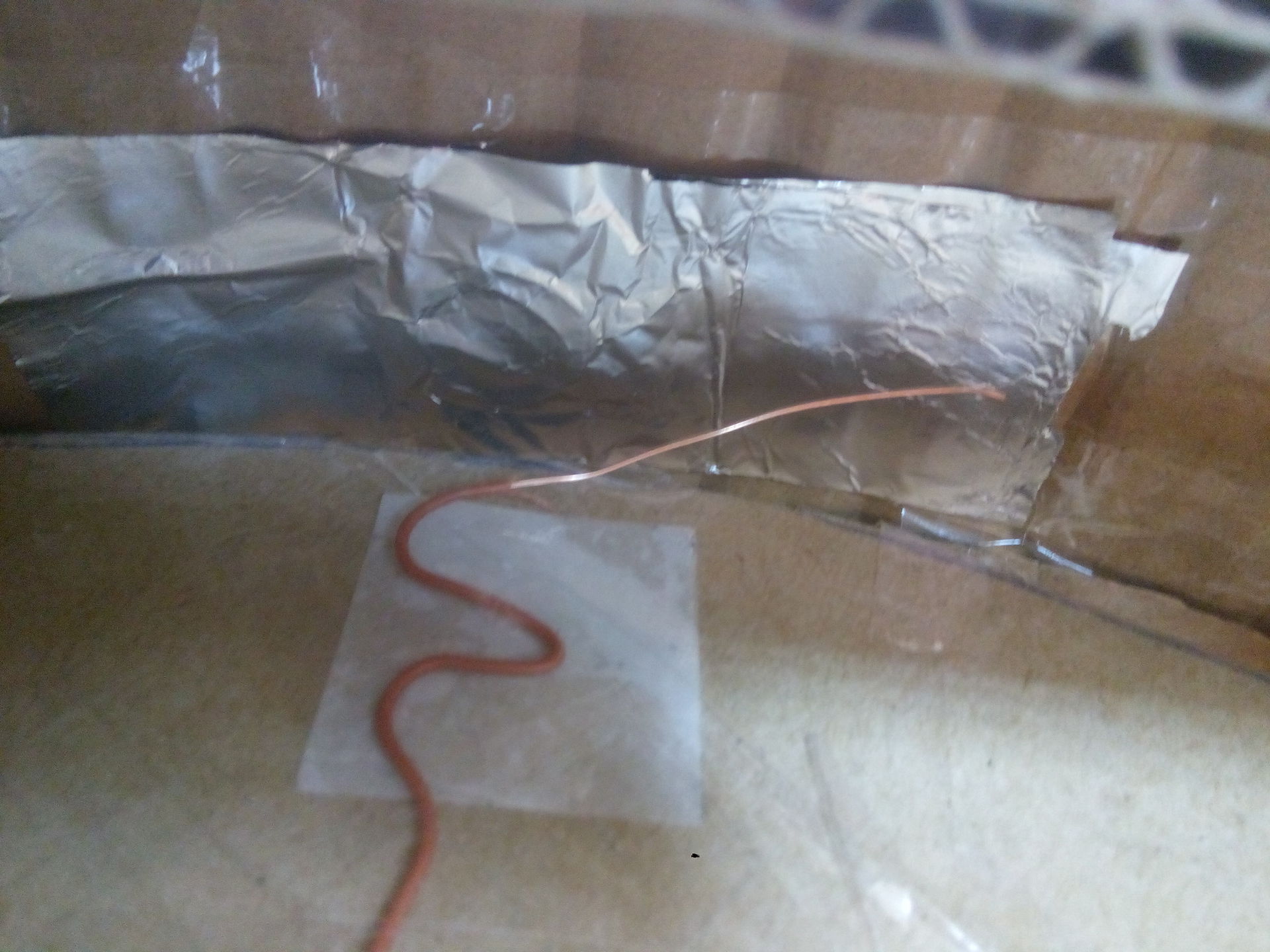
Все это хозяйство удачно передвигалось по офису и вело себя намного адекватнее, чем с дальномерами.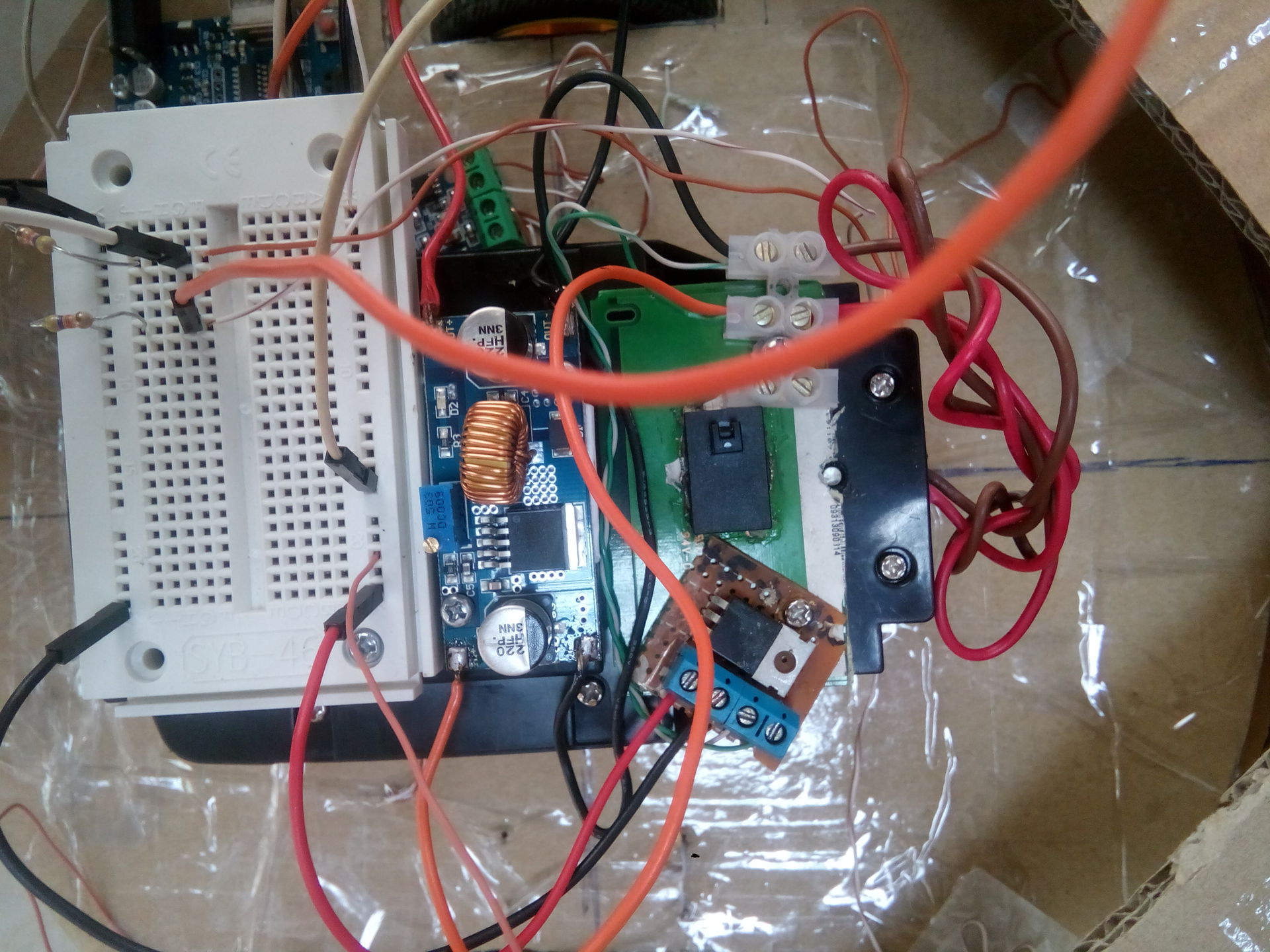
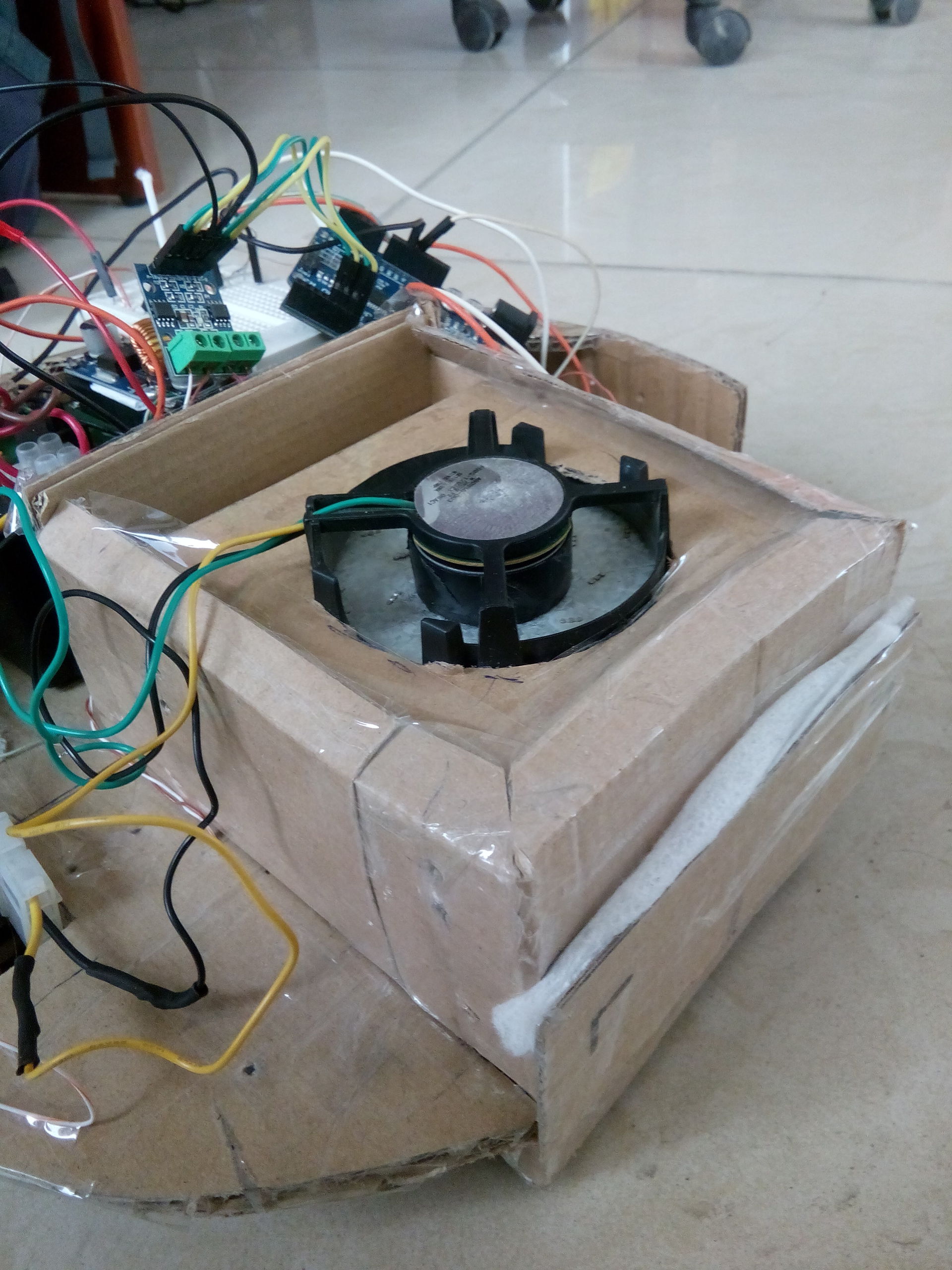
Теперь самое веселое — соорудить непосредственно сам пылесборник и пылесос. Я испробовал кучу вариантов, благо картон и скотч позволяют конструировать макеты очень быстро, хоть и с большими допусками. В качестве питания турбины использую чистые +18v с БП. Кулеры, правда, греются, но ничего, работают.
На фото самый первый вариант пылесоса, без фильтров и прочей ерунды: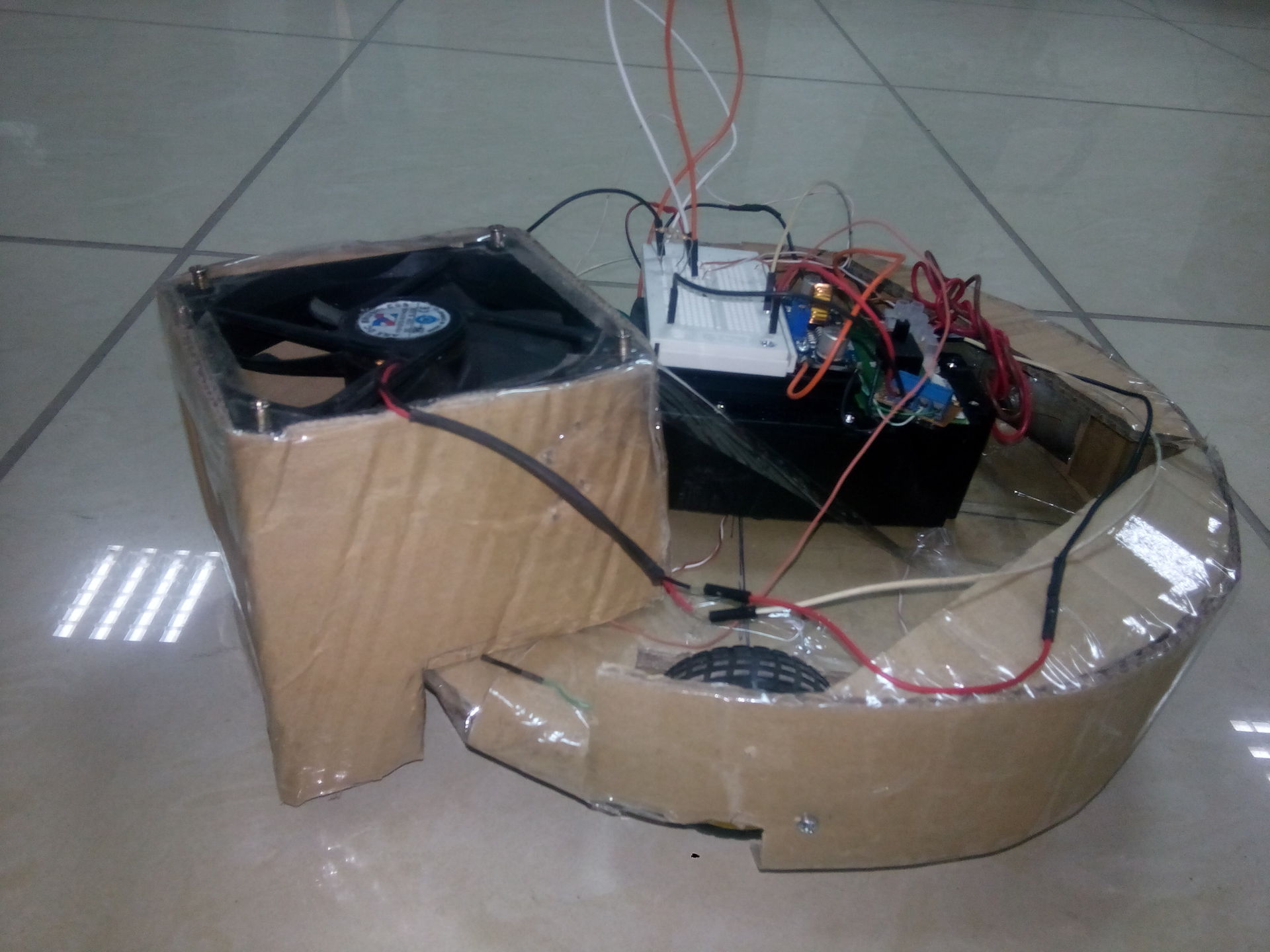
Берем кулер от процессора, отламываем все лопасти. На суперклей закрепляем турбину. Сложность заключается в балансировке, поэтому клеить надо точно и сразу проверять на дисбаланс. Сложно, но можно. При 18V входных и с турбиной кулер выдает около 2600 RPM без нагрузки. Тянет воздух хорошо, в общем. 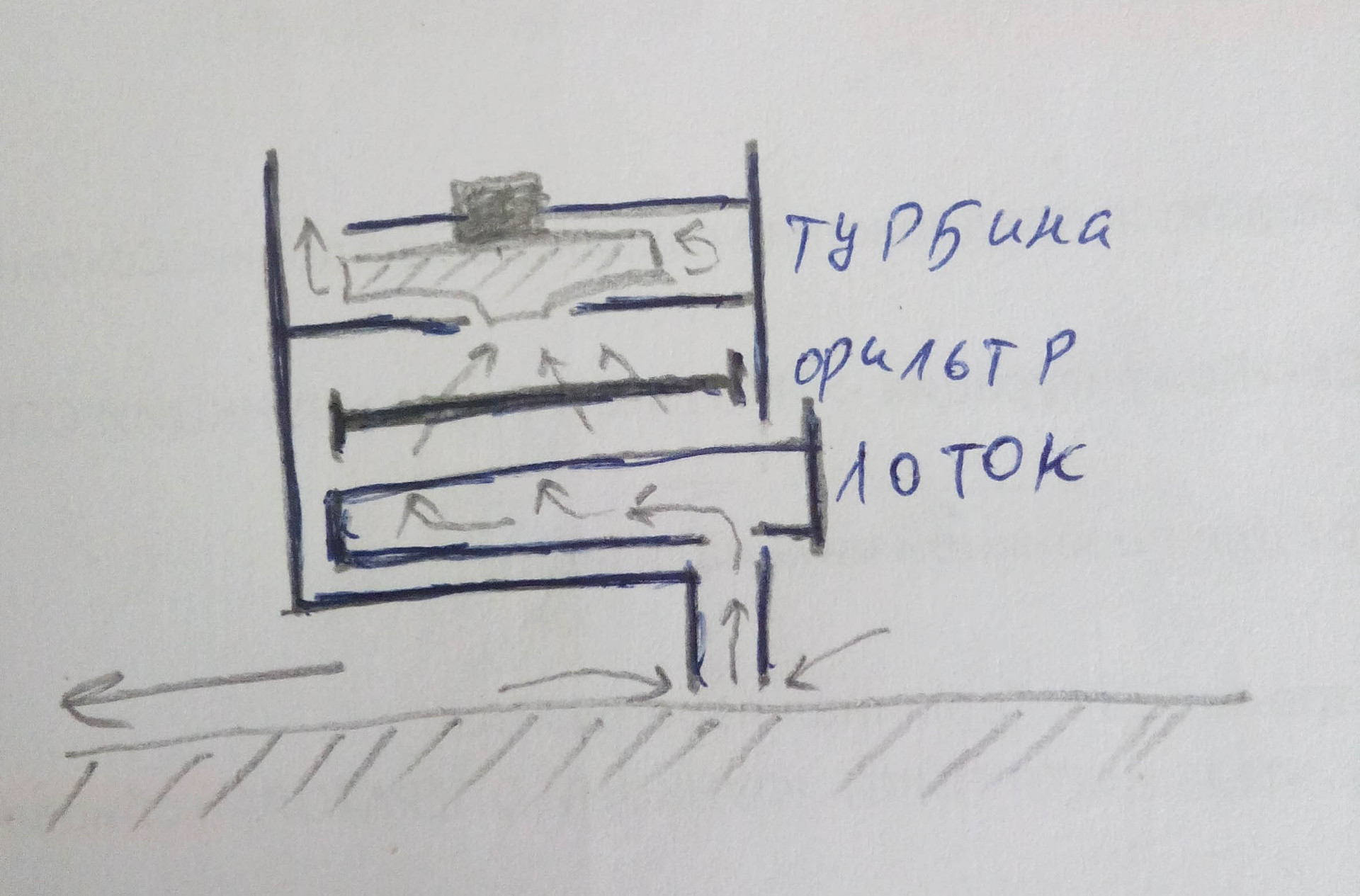



Планы на будущее
- Собрать платформу из фанеры;
- Перекомпоновать все модули и разводку проводов;
- Перекомпоновать блок с аккумуляторами и контроллером заряда;
- Прикупить-таки нормальные мотор-редукторы с оборотами в районе 40-80rpm;
- Установить 2 вращающиеся щетки спереди;
- Направить выдуваемый воздух под платформу (чтобы воздух циркулировал и сдувал пыль в приемное отверстие);
- Поменять Arduino UNO на маленький аналог — Arduino mini
Вы можете помочь и перевести немного средств на развитие сайта
Рекомендации по эксплуатации
Современная техника для «умного дома» требует особенного ухода. Если соблюдать рекомендации касаемо эксплуатации такого оборудования, робот может прослужить не один год.
Правила использования оборудования:
- протирать пылесос нужно только сухой тряпкой;
- если робота не планируется использовать в ближайшее время, лучше вытащить аккумулятор;
- перед началом уборки уберите с пола мелкие и хрупкие предметы;
- не трогайте зарядное устройство или робота мокрыми руками;
- не убирайте при помощи робота химические вещества и краску;
- регулярно нужно очищать контейнер и колесико.
Что для вас предпочтительней: живое общение, или любимый мессенджер?
Общение — это когда видишь собеседника лично. Все остальное — иллюзия общения. 293 ( 29.24 % )
Не люблю общаться с людьми в живую, написать сообщение мне прозе и удобней. 89 ( 8.88 % )
Общаюсь и в живую, и в соц сетях. Один способ вовсе не исключает другой. 620 ( 61.88 % )
Используя такую технику для дома правильно, можно существенно сэкономить свое время.
Требуемые компоненты
Для сборки пылесоса на Ардуино потребуются компоненты:
- блок управления;
- отдельный контроллер для управления работой электродвигателей (обозначается на схемах как H-Bridge);
- электрические двигатели постоянного тока с редукторами для привода боковых колес;
- комплект колес;
- источник питания (аккумуляторы или батарейки, суммарное напряжение 5 В);
- турбина (используется узел, предназначенный для охлаждения процессоров или чипов видеокарт);
- адаптер питания (при использовании компонентов, рассчитанных на напряжение 12 В);
- комплект магнитов;
- коммутационный шнур USB;
- комплект кабелей для подключения блока Ардуино к цепям оборудования;
- листовой плотный картон;
- термический клей в тубе;
- пистолет для нанесения клея;
- резервуар для сбора пыли (готовый пластиковый или металлический контейнер);
- пластиковые хомуты;
- металлическая банка от напитков (для изготовления крепежных элементов).